Introduction to Flight Dynamics
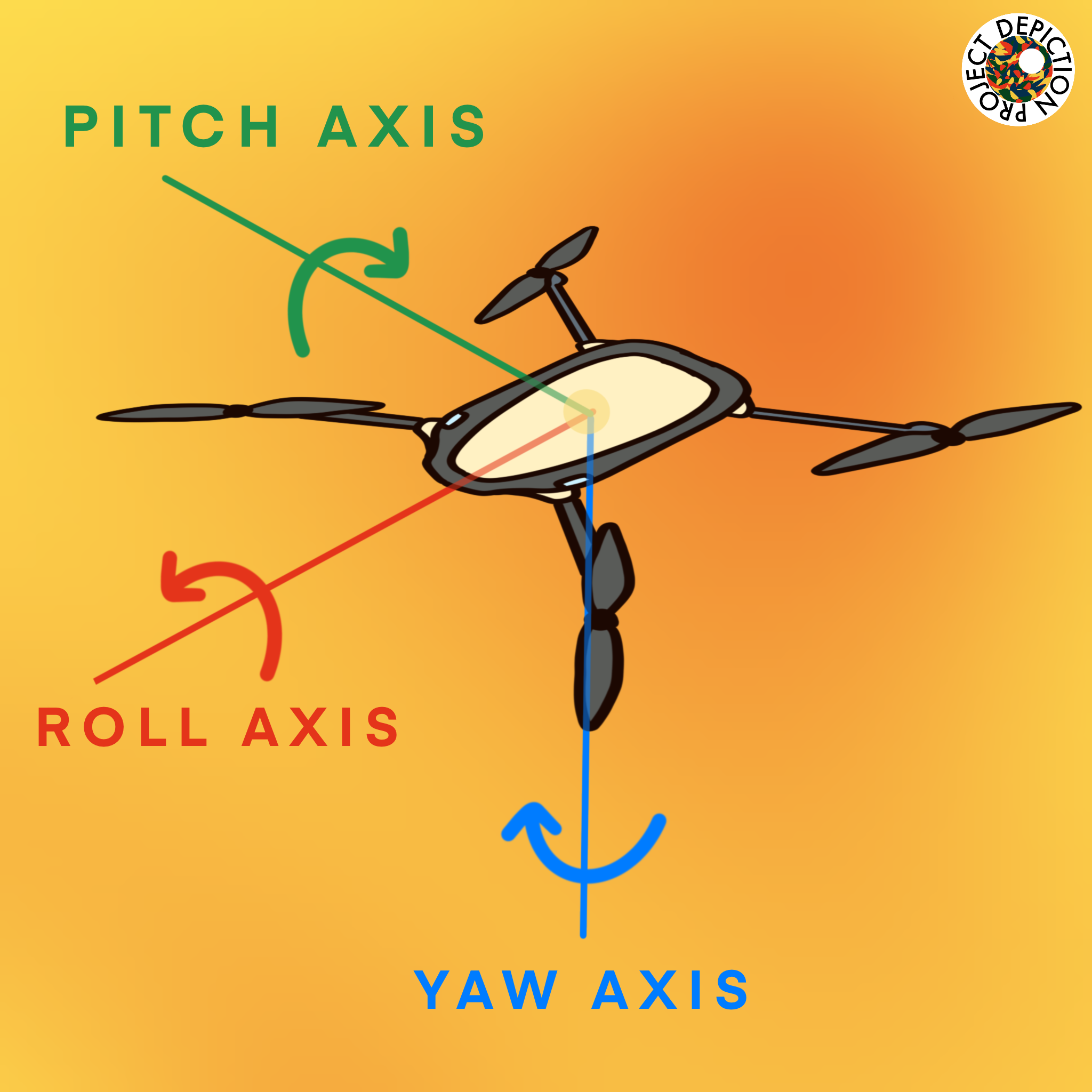
Three types of movement that a drone can make: ROLL, PITCH, YAW.
Roll & Pitch
Roll motion enables the drone to move left, or right. When the drone rolls left, it moves to the left, and when the drone rolls right, it move to the right. Roll movement is similar to when you move your head to your shoulder. Pitch motion enables the drone to move forward/backward. When the drone pitches downward, it moves forward. When the drone pitches upward, it moves backward. Pitch movement is similar to when you nod your head.
Roll motion enables the drone to move left, or right. When the drone rolls left, it moves to the left, and when the drone rolls right, it move to the right. Roll movement is similar to when you move your head to your shoulder. Pitch motion enables the drone to move forward/backward. When the drone pitches downward, it moves forward. When the drone pitches upward, it moves backward. Pitch movement is similar to when you nod your head.
Yaw
Yaw motion enables the drone to rotate clockwise/ counter-clockwise. When the drone front yaws to the left, it rotates counter-clockwise. When the drone front yaws to the right, it rotates clockwise. Yaw movement is similar to when you shake your head to say no.
Yaw motion enables the drone to rotate clockwise/ counter-clockwise. When the drone front yaws to the left, it rotates counter-clockwise. When the drone front yaws to the right, it rotates clockwise. Yaw movement is similar to when you shake your head to say no.
Vertical Movement
For information about lift, check the previous chapter!
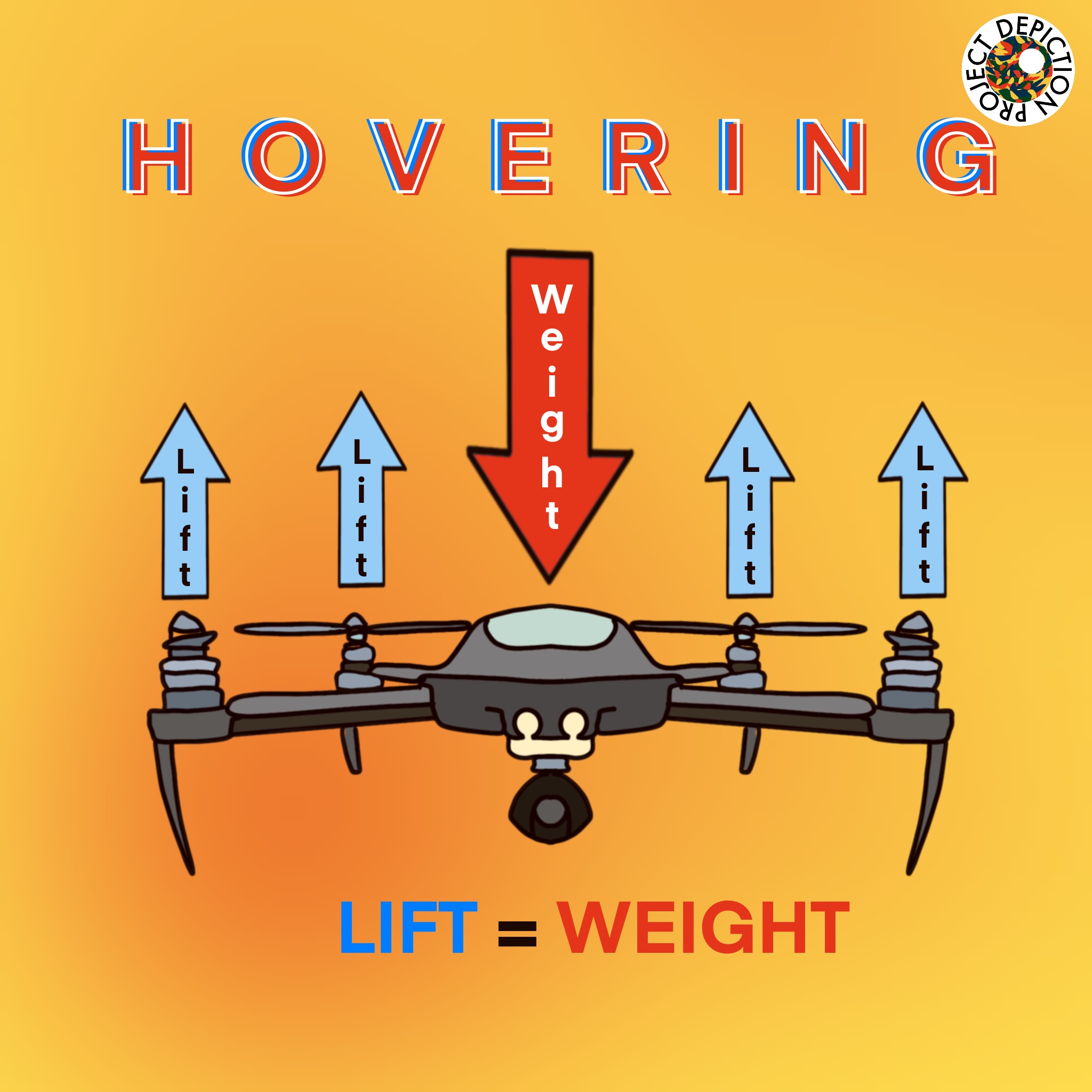
Take Off, Landing, Hovering
Each spinning propeller creates a lift. If the sum of the lift created by the four propellers are greater than the weight of the drones, the drone will take off. On the other hand, if the lift is less than the weight of the drone, the drone will fly down. Lastly, if the lift is equal to the weight of the drone, the drone will stay still vertically.
Each spinning propeller creates a lift. If the sum of the lift created by the four propellers are greater than the weight of the drones, the drone will take off. On the other hand, if the lift is less than the weight of the drone, the drone will fly down. Lastly, if the lift is equal to the weight of the drone, the drone will stay still vertically.
Calculation Example:
If each propeller creates a 2 N lift and the weight of the drone is 7N, how will the drone move vertically ?
Yes, the drone will fly up! This is because the lift created by the four propellers is equal to 2 N x 4 = 8 N, which is greater the weight of the drone, 7 N.
If each propeller creates a 2 N lift and the weight of the drone is 7N, how will the drone move vertically ?
Yes, the drone will fly up! This is because the lift created by the four propellers is equal to 2 N x 4 = 8 N, which is greater the weight of the drone, 7 N.
Lateral Movement - Left / Right
What can unequal lift between different propeller pairs do?
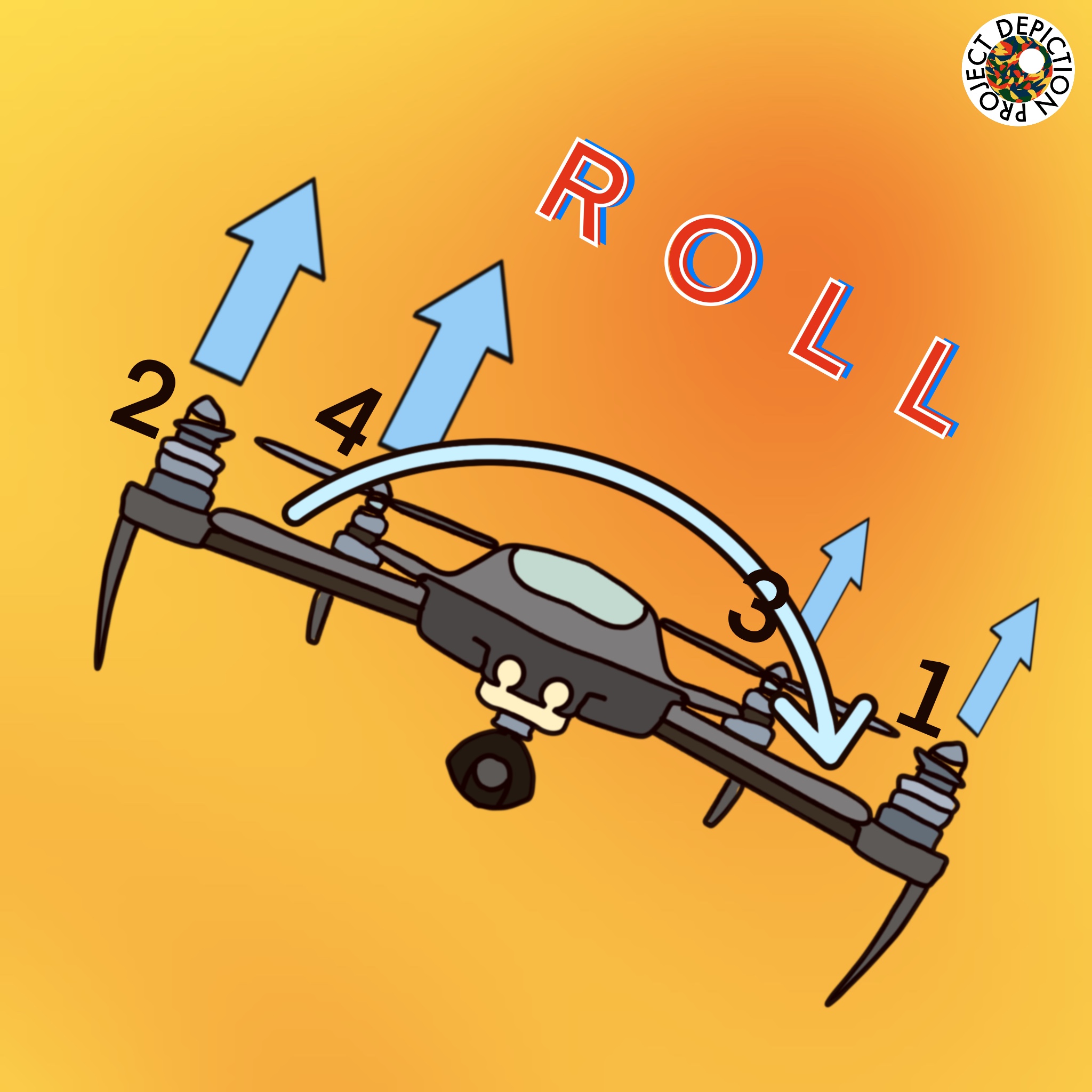
Left / Right
Increasing the rotation speed of a propeller pair on a particular side of the drone will generate more lift on one side of the drone than other side. This will cause the drone to roll, and move towards the direction of the side where there is less lift. For the drone to move to the left, the lifts from propellers 2,4 must be greater than that of propellers 1,3. For the drone to move to the right, the sum lift from propellers 1,3 must be greater than that of propellers 2,4.
Increasing the rotation speed of a propeller pair on a particular side of the drone will generate more lift on one side of the drone than other side. This will cause the drone to roll, and move towards the direction of the side where there is less lift. For the drone to move to the left, the lifts from propellers 2,4 must be greater than that of propellers 1,3. For the drone to move to the right, the sum lift from propellers 1,3 must be greater than that of propellers 2,4.
Calculation Example:
Suppose propeller 1,3 each creates a 1.2 N lifts, and propeller 2,4 each creates a 0.8N lift. What would happen?
The sum lifts of propeller 1,3 is greater than the sum lift created by propellers 2,4 (2.4N >1.6N), so the drone moves to the right.
Suppose propeller 1,3 each creates a 1.2 N lifts, and propeller 2,4 each creates a 0.8N lift. What would happen?
The sum lifts of propeller 1,3 is greater than the sum lift created by propellers 2,4 (2.4N >1.6N), so the drone moves to the right.
Lateral Movement - Forward / Backward
Moving forward is super similar to moving left and right !
Forward / Backward
To move the drone forward, the sum of the lifts created by propellers 3 and 4 must be greater than the sum of the lift created by propellers 1 and 2. On the other hand, to move the drone backward, the sum of the lifts created by propellers 1 and 2 must be greater than the sum of the lift created by propellers 3 and 4.
To move the drone forward, the sum of the lifts created by propellers 3 and 4 must be greater than the sum of the lift created by propellers 1 and 2. On the other hand, to move the drone backward, the sum of the lifts created by propellers 1 and 2 must be greater than the sum of the lift created by propellers 3 and 4.

Calculation Example:
Suppose propeller 3,4 each creates a 1 N lifts, and propeller 1,2 each creates a 0.8 N lift. What would happen?
The sum lifts of propeller 3,4 is 2 N, which is greater than the sum lift created by propellers 1,2, which is 1.6 N, so the drone moves forward.
Suppose propeller 3,4 each creates a 1 N lifts, and propeller 1,2 each creates a 0.8 N lift. What would happen?
The sum lifts of propeller 3,4 is 2 N, which is greater than the sum lift created by propellers 1,2, which is 1.6 N, so the drone moves forward.
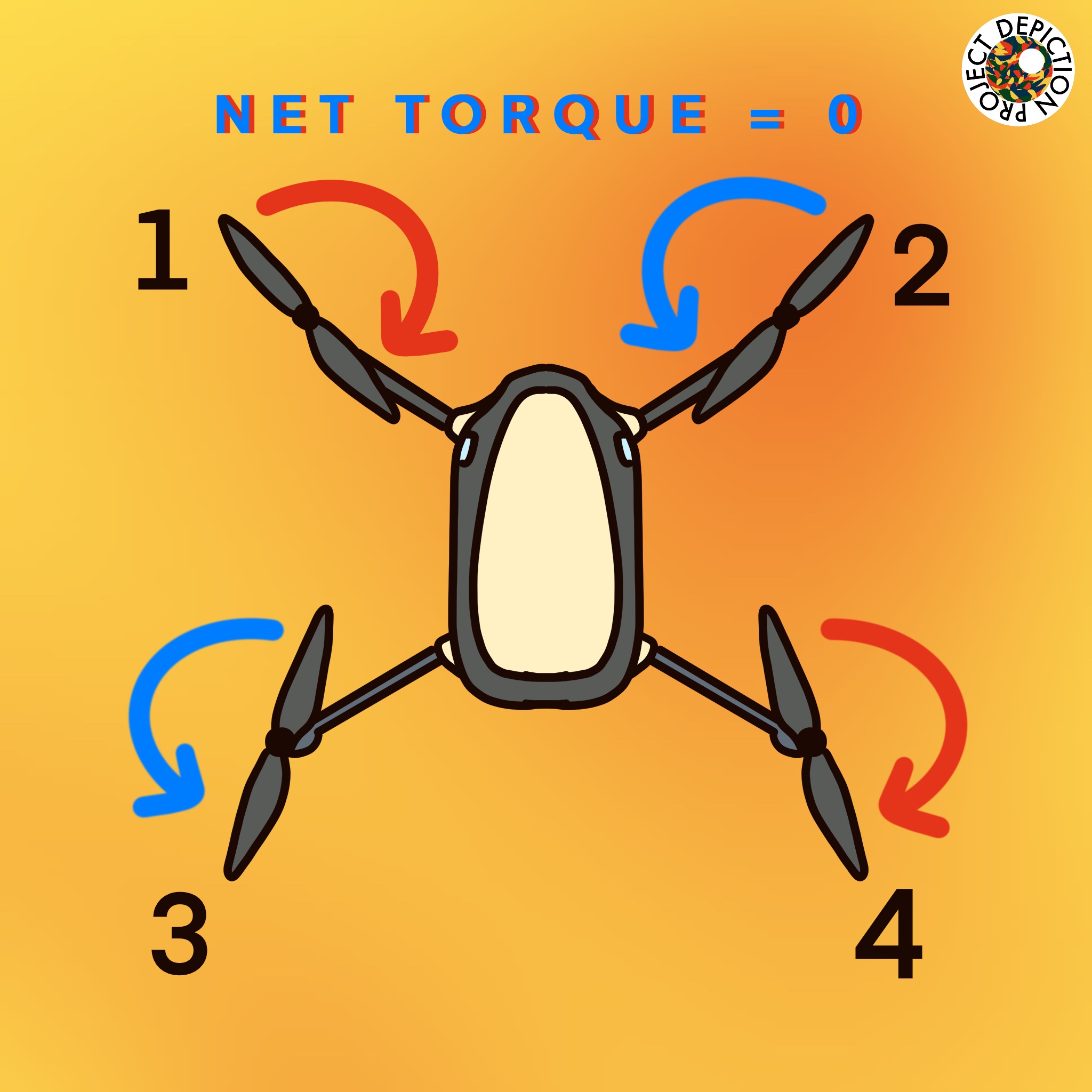
Rotational Movement
Propeller rotating clockwise produces a counter-clockwise torque in
equal magnitude and opposite direction.
Clockwise/Counter-Clockwise
Rotational movement depends on torque. To rotate the drone clockwise, propeller 2 and 3 must rotate at a faster rate than propeller 1,4. This is because the reaction clockwise torque generated from propeller 2,3 will be greater than the reaction counter-clockwise torque generated from propeller 1,4. On the contrary, to rotate the drone counter-clockwise, propeller 1 and 4 must rotate at a faster rate than propeller 2,3.
Rotational movement depends on torque. To rotate the drone clockwise, propeller 2 and 3 must rotate at a faster rate than propeller 1,4. This is because the reaction clockwise torque generated from propeller 2,3 will be greater than the reaction counter-clockwise torque generated from propeller 1,4. On the contrary, to rotate the drone counter-clockwise, propeller 1 and 4 must rotate at a faster rate than propeller 2,3.
Calculation Example:
Suppose the propeller 1,4 each produces a counter-clockwise torque of magnitude 2 Nm and the propeller 2,3 each produces a clockwise torque of magnitude 1 Nm. Will the drone rotate clockwise or counter-clockwise?
Since the sum of the counter-clockwise torque,4 Nm, is greater than the sum of the clockwise torque, 2 Nm, the drone will rotates counter-clockwise.
Suppose the propeller 1,4 each produces a counter-clockwise torque of magnitude 2 Nm and the propeller 2,3 each produces a clockwise torque of magnitude 1 Nm. Will the drone rotate clockwise or counter-clockwise?
Since the sum of the counter-clockwise torque,4 Nm, is greater than the sum of the clockwise torque, 2 Nm, the drone will rotates counter-clockwise.